工具/原料
- matlab
- 电脑
方式/步骤
- 1
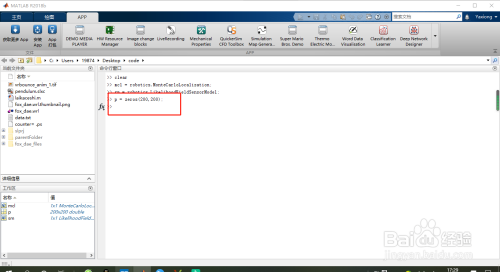
%建立一个MCL对象。
号令行键入:
mcl = robotics.MonteCarloLocalization;
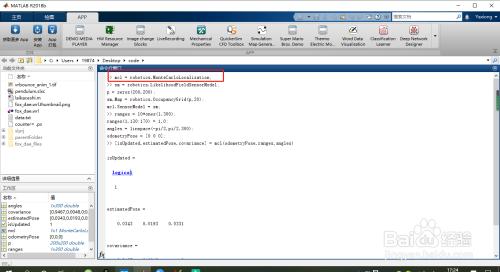
- 2
%将带有占用网格映射的传感器模子分派给对象。
号令行键入:
sm = robotics.LikelihoodFieldSensorModel;
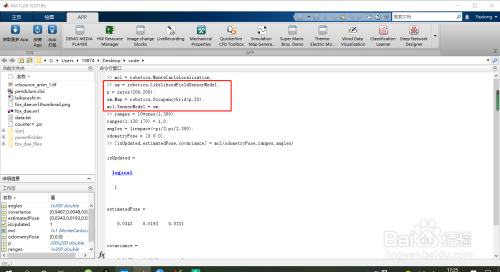
- 3
号令行键入:
p = zeros(200,200);
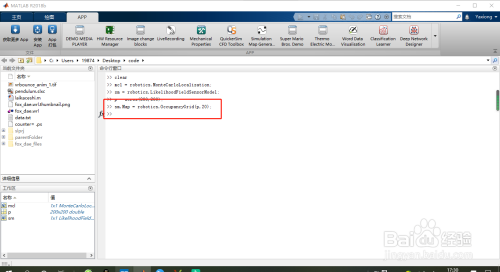
- 4
号令行键入:
sm.Map = robotics.OccupancyGrid(p,20);
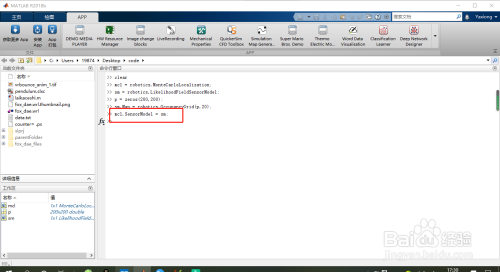
- 5
号令行键入:
mcl.SensorModel = sm;
- 6
%建立样品激光扫描数据输入。
号令行键入:
ranges = 10*ones(1,300);
ranges(1,130:170) = 1.0;
angles = linspace(-pi/2,pi/2,300);
odometryPose = [0 0 0];
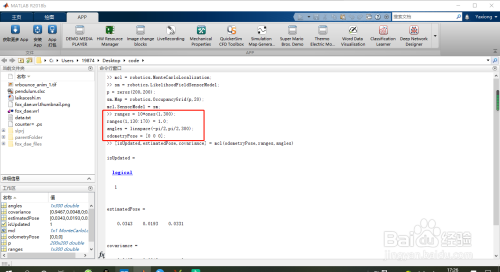
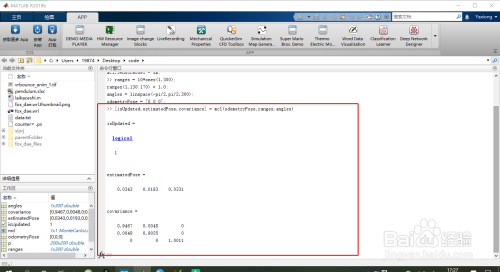
- 7
%估量机械人的姿态和协方差。
号令行键入:
[isUpdated,estimatedPose,covariance] = mcl(odometryPose,ranges,angles)