工具/原料
- matlab
- 电脑
方式/步骤
- 1
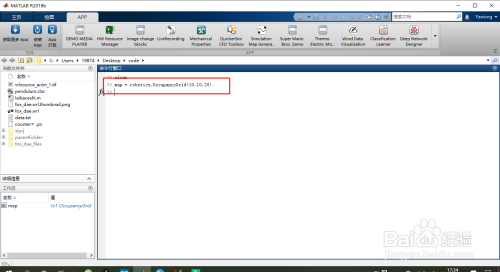
%建立一个空的占用网格地图。
号令行键入:
map = robotics.OccupancyGrid(10,10,20);
- 2
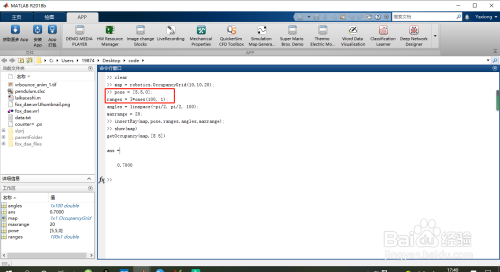
%在占用网格中插入激光扫描。指定机械人的姿态规模和角度以及
号令行键入:
pose = [5,5,0];
ranges = 3*ones(100, 1);
- 3
%指定机械人的角度
号令行键入:
angles = linspace(-pi/2, pi/2, 100);
- 4
%激光扫描的最大规模。
号令行键入:
maxrange = 20;
insertRay(map,pose,ranges,angles,maxrange);
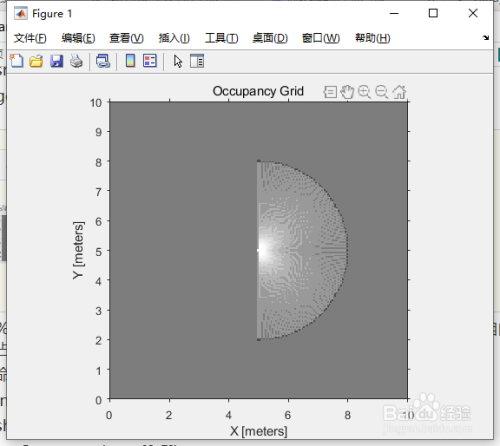
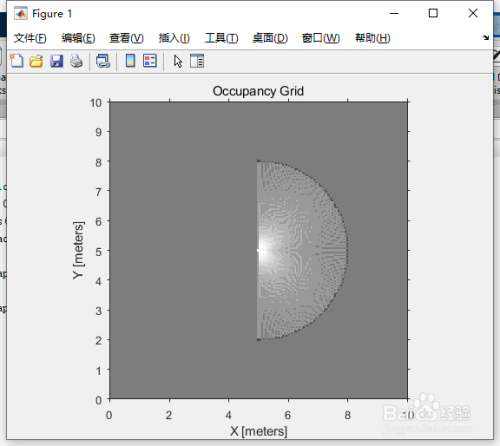
- 5
%显示地图,以查看插入激光扫描的成果。查抄机械人正前方的锅的利用环境。
号令行键入:
show(map)
getOccupancy(map,[8 5])
- 6
%添加二读并查看对占用值的更新。
号令行键入:
insertRay(map,pose,ranges,angles,maxrange);
- 7
%显示图像。
show(map)
getOccupancy(map,[8 5])